
О лаборатории
Лаборатория цифровых систем управления сложными динамическими объектами создана 1 августа 2022 (Приказ №1624 от 25.07.2022) в структуре УНИР ТулГУ.
 |  |
Научные исследования в Лаборатории направлены на разработку новых подходов к анализу и синтезу интеллектуальных систем управления сложными динамическими объектами в том числе в составе комплексов специального назначения.
 |  |
Состав лаборатории
На текущий момент доля исследователей в возрасте до 39 лет в общей численности коллектива лаборатории составляет 90%, средний возраст 30 лет. Всего в штатном составе лаборатории:
- 1 доктор наук;
- 3 кандидата наук;
- 3 соискателя;
- 2 магистранта;
- 1 студент.
Подробнее о сотрудниках лаборатории можно узнать в разделе Структурные подразделения.

Заведующий лабораторией
к.т.н.
Ефромеев А.Г.

Ведущий научный сотрудник
д.т.н.
Феофилов С.В.

Старший научный сотрудник
к.т.н.
Козырь А.В.

Старший научный сотрудник
к.т.н.
Стёпочкин А.О.

Младший научный сотрудник
соискатель
Хапкин Д.Л.

Младший научный сотрудник
соискатель
Гейс Э.А.

Младший научный сотрудник
соискатель
Ломакин А.К.

Младший научный сотрудник
магистрант
Олейников А.О.

Младший научный сотрудник
магистрант
Соболь И.И.

Лаборант-исследователь
студент
Ромадов С.В.
Основные научные направления
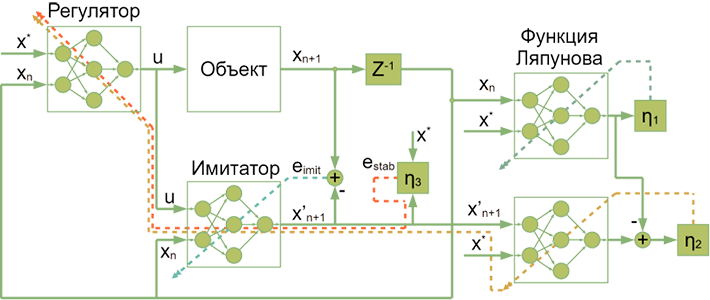
Перспективные методы анализа и синтеза систем управления сложными объектами с использованием технологий искусственного интеллекта и классического подхода
Решаемые задачи:
- развитие теории автоматического управления и за счёт внедрения технологий машинного обучения и искусственного интеллекта с целью повышение качества управления сложными динамическими объектам;
- разработка методик, позволяющих ускорить и упростить синтез нейросетевых регуляторов;
- создание методов верификации и оценки качества работы нейросетевых регуляторов;
- реализация систем управления с применение искусственных нейронных сетей и других технологий искусственного интеллекта на современной, в том числе отечественной, элементной базе с учетом ограниченных вычислительных ресурсов бортовых систем.
Исследования поддержаны грантом РНФ 23-29-00609 «Перспективные методы синтеза и оптимизации нейросетевых систем управления для нелинейных объектов с ограничителями в условиях неполной информации»
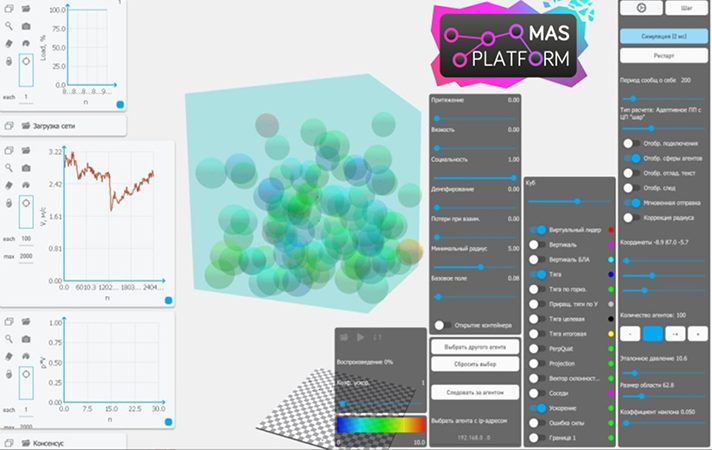
Разработка алгоритмов управления многоагенными системами (роевое управление)
Решаемые задачи:
- развитие разработанного метода управления роем на основе эквивалента теплового движения;
- проработка вопросов реализации методов управления роем с учетом ограниченных вычислительных ресурсов бортовых систем;
- повышение адаптивности роя к изменениям задач и окружающей обстановки;
- обеспечения функционирования гетерогенного роя, состоящего из беспилотных аппаратов воздушного, наземного и подводного типов;
- совершенствование разработанной программной среды проектирования и моделирования многоагентных систем.
Исследования поддержаны грантом РНФ 23-29-10077 «Методика проектирования системы управления роем беспилотных летательных аппаратов».
Разработка теории и методов проектирования мехатронных систем высокоточных комплексов
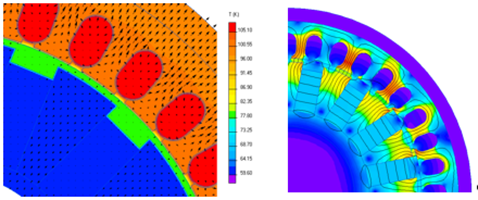
Решаемые задачи:
- разработка полевых математических моделей перспективных исполнительных двигателей мехатронных модулей, позволяющих оптимизировать конструктивные параметры двигателей;
- синтез алгоритмов управления и коммутации перспективных исполнительных двигателей мехатронных модулей, обеспечивающих выполнений требований ТЗ при жестких ограничениях на массогабаритные характеристики;
- создание автоматизированного программного обеспечения для расчета и оптимизации конструктивных параметров перспективных исполнительных двигателей, формирования алгоритмов управления и коммутации.
Контакты
Заведующий лабораторией
Ефромеев Андрей Геннадьевич
age.sau@mail.ru