Институт высокоточных систем им. В.П. Грязева
Институт высокоточных систем им. В.П. Грязева
Приборы управления (ПУ)
Дирекция
- Телефон
- +7 (4872) 35-19-59 —
- Почта
- tgupu@yandex.ru —
- Адрес
- 300012, г. Тула, пр. Ленина, д. 95, кафедра «Приборы управления»
Наука
Научная деятельность кафедры связана с разработкой современных систем ориентации, стабилизации и навигации подвижных объектов различного назначения, охватывающей проблемы интегрирования и обработки информации измерительных и управляющих систем, построенных на элементах и узлах высокоточной механики, нано- и микромеханики с электронными, электротехническими, оптическими и вычислительными компонентами.
Научные направления кафедры:
- Разработка алгоритмов бескарданных инерциальных систем ориентации и навигации на гироскопах различной физической природы (лазерных, волоконно-оптических, волновых твердотельных, микромеханических), включая способы комплексирования и оптимальной фильтрации;
- Испытания, настройка и калибровка гироскопических датчиков первичной информации, акселерометров и инерциальных измерительных модулей;
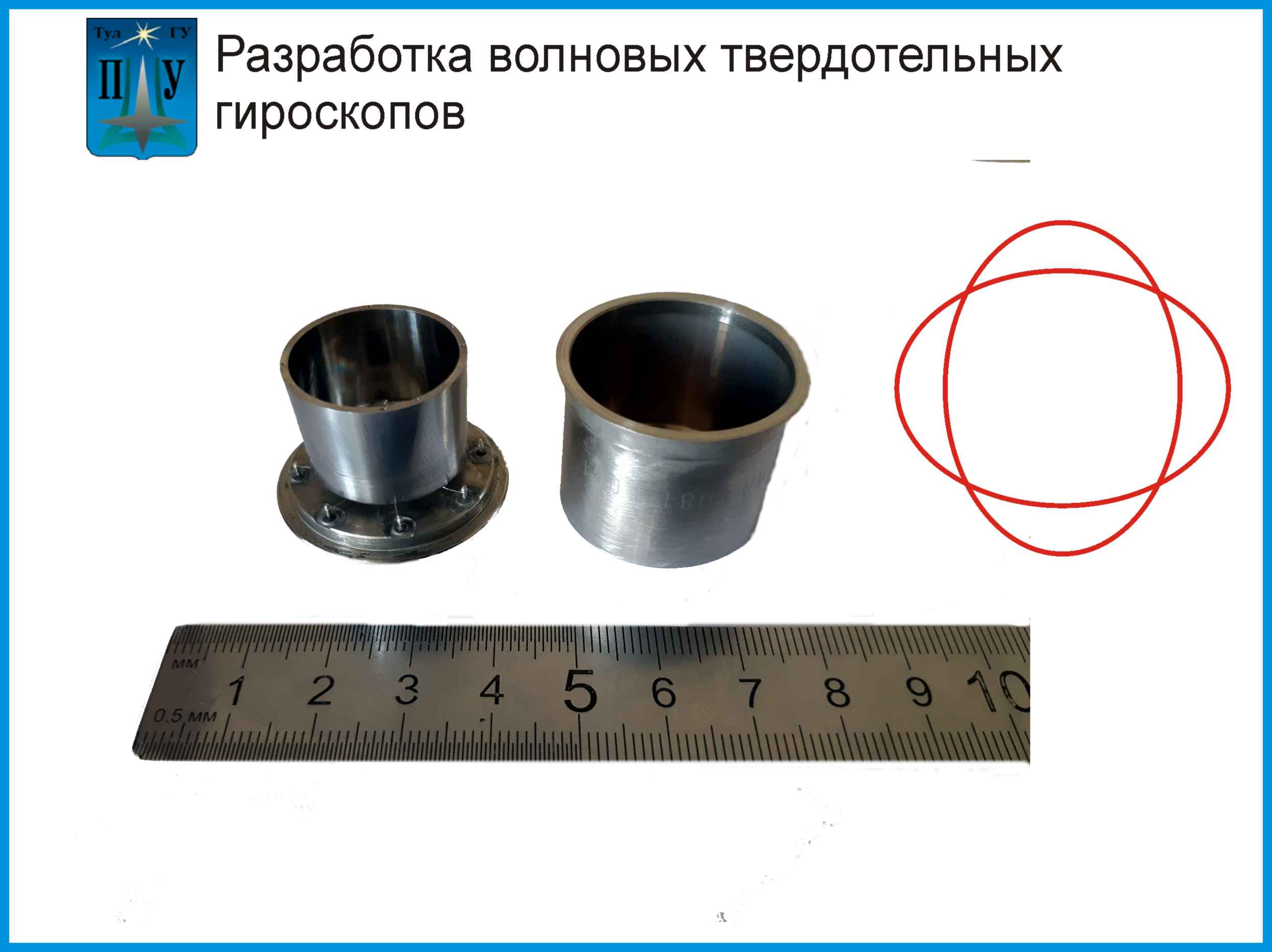
- Разработка конструкций и алгоритмов функционирования волновых твердотельных гироскопов с металлическим резонатором при позиционном возбуждении стоячей волны;
- Разработка микросистемной авионики (автопилотов, телеметрических модулей и комплексов ориентации и навигации) малоразмерных беспилотных летательных аппаратов, включая высокодинамичные вращающиеся по крену носители;
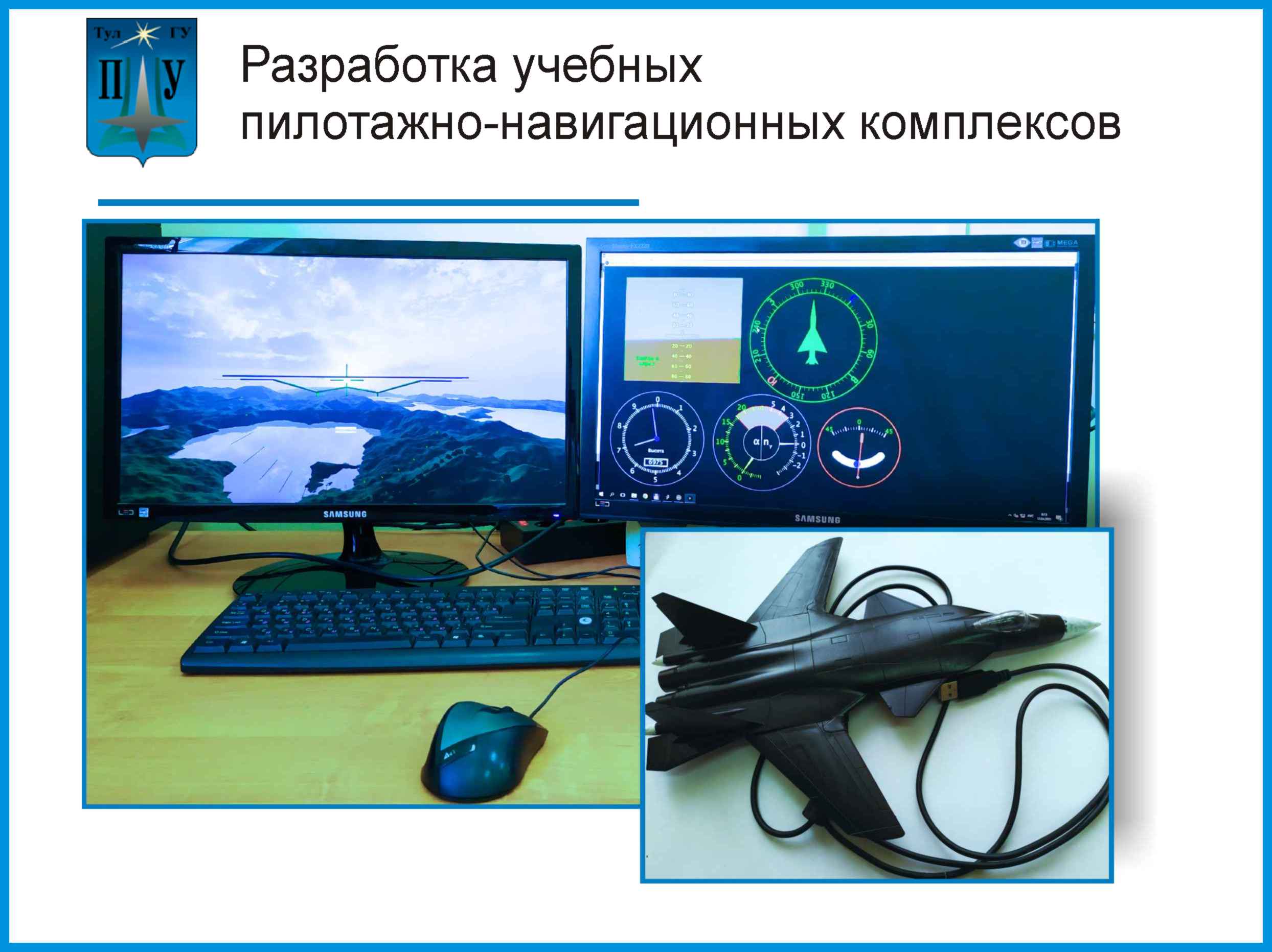
- Разработка пилотажно-навигационных систем пилотируемых воздушных судов с цифровыми системами отображения информации;
- Разработка систем ориентирования и стабилизации малых космических аппаратов с гироскопическими датчиками в контуре управления;
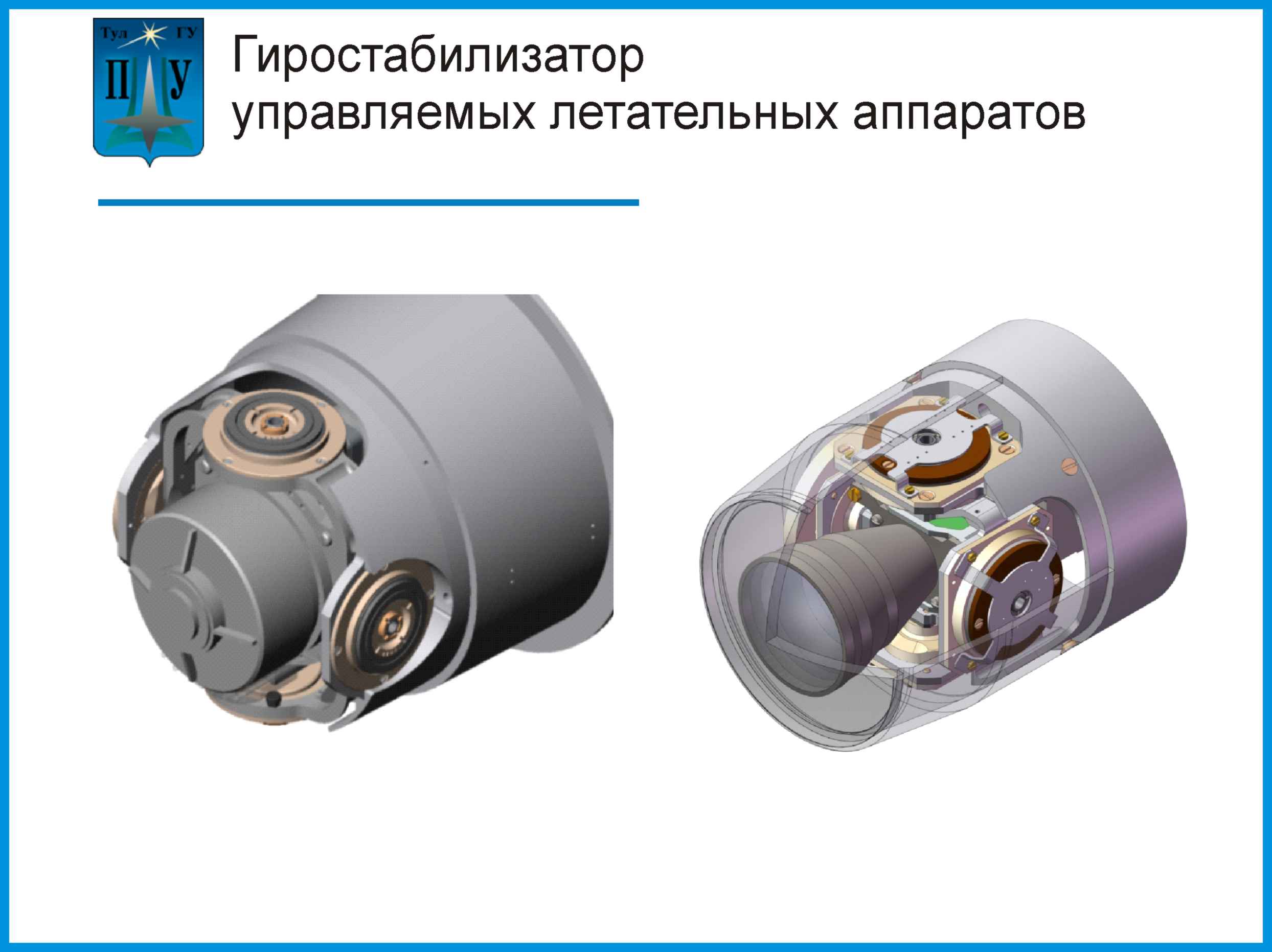
- Разработка гироскопических стабилизаторов полезной нагрузки, следящих оптико-электронных координаторов и головок самонаведения;
- Разработка бортовых гироскопических приборов ракет ближней тактической зоны (гироскопических раскладчиков команд, гироскопов направления, измерителей угловых перемещений и др.);
- Проектирование и конструирование различных типов оптических, оптико-электронных и лазерных систем, включая монтаж, наладку, испытания и сдачу в эксплуатацию опытных образцов лазерной и оптической техники.
На кафедре «Приборы управления» выполнялись научно-исследовательские и опытно-конструкторские работы в интересах предприятий Российской Федерации, среди которых:
- ПО «Южморгеология» г. Геленджик,
- АО Завод «Измеритель» г. Смоленск,
- Азовский оптико-механический завод,
- МНИТИ телевидения, г. Москва,
- «ГосНИИАС» - институт авиационных систем г. Москва,
- АО «ГосМКБ «Вымпел г. Москва,
- АО «Мичуринский завод «Прогресс г. Мичуринск,
- АО Конструкторское бюро приборостроения им. академика А.Г. Шипунова г. Тула,
- АО «НПО «Сплав» г. Тула,
- Федеральный ядерный центр им. академика Забабахина (г. Снежинск),
- Концерн ЦНИИ электроприбор г. Санкт-Петербург.
Тематика некоторых из выполненных НИР и ОКР: «Разработка гиростабилизатора Терция - ГС», «Разработка математической модели и имитационное моделирование двухосного управляемого индикаторного гирокоординатора», «Исследование возможности создания электронной аппаратуры управления гироскопическим координатором», «Математическое моделирование гироскопического координатора по схеме двухосного индикаторного гиростабилизатора», «Разработка линейного акселерометра с частотным выходом для системы управления», грант «Разработка физических и технологических принципов создания измерительных средств повышенной точности для проведения работ в области гравиинерциальных и гидрографических измерений с подвижного объекта», «Разработка способов увеличения точности и улучшения динамических характеристик гироскопического датчика угла на базе датчика Д7-03», «Научное и методическое обеспечение построения высокоточного измерителя угла наклона платформы на основе датчика Д7-03М с цифровой обработкой сигнала», «Разработка электронных блоков для модернизированного гироскопа Д-7», «Модернизация гравиметрического комплекса ГРИН-2000», грант «Исследование оптико-электронных методов пространственно - угловых измерений и создание на их основе широкого класса измерительных приборов повышенной точности», «Разработка и серийное производство конкурентноспособного многооборотного интеллектуального электропривода нового поколения для управления, регулирования, и мониторинга запорной арматурой систем автоматизации предприятий, газовых и нефтяных магистралей, ТЭЦ, ГРЭС, ГЭС и АЭС.